Step-by-Step: How the Puck Moves
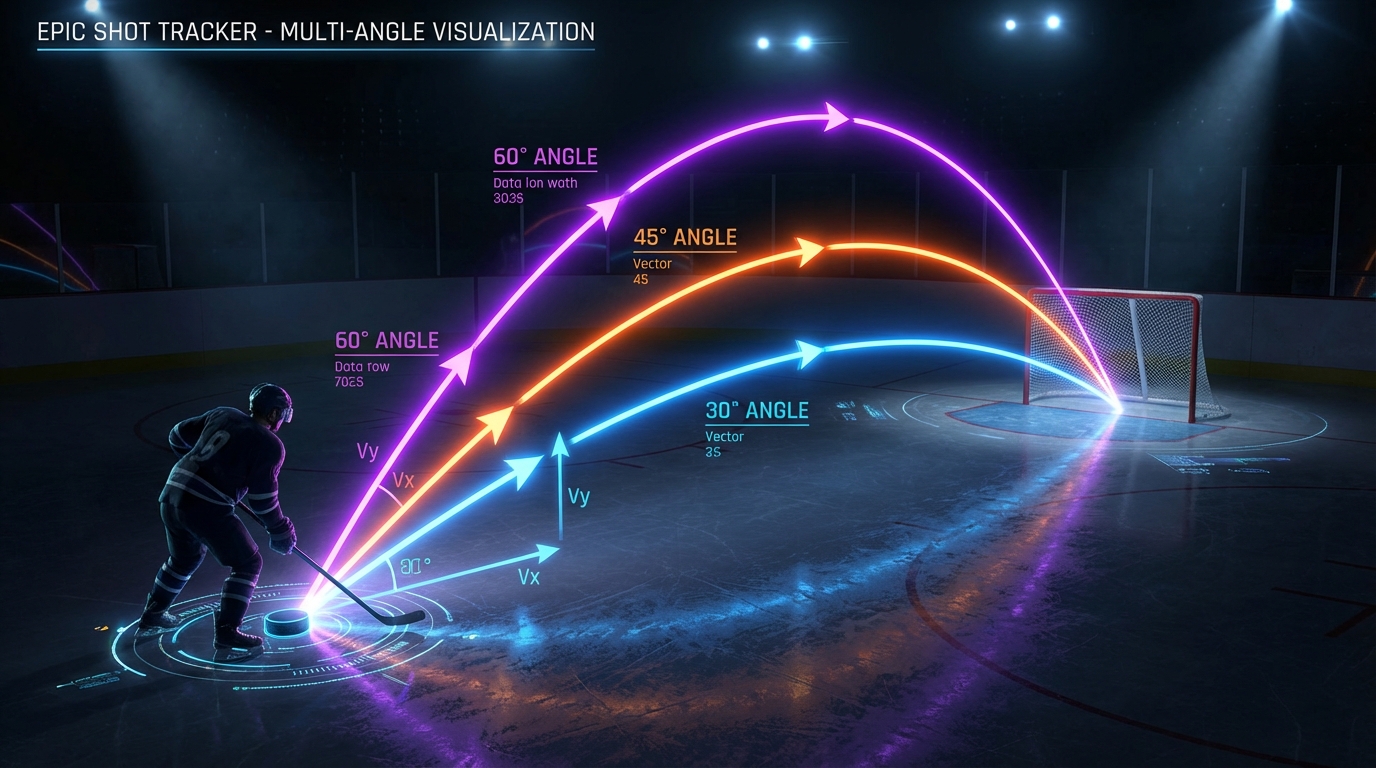
Let's break down a puck's flight into small time steps to see exactly how it moves. We'll shoot at 30° with initial speed of 80 ft/s.
📊 Part 1: Iteration in X-Dimension (Horizontal Motion)
Simple pattern: Horizontal speed stays constant (no gravity sideways!)
Each 0.1 second:
• t = 0.0s: x = 0 ft
• t = 0.1s: x = 0 + 69.3×0.1 = 6.93 ft
• t = 0.2s: x = 6.93 + 69.3×0.1 = 13.86 ft
• t = 0.3s: x = 13.86 + 69.3×0.1 = 20.79 ft
• t = 0.4s: x = 20.79 + 69.3×0.1 = 27.72 ft
• t = 0.5s: x = 27.72 + 69.3×0.1 = 34.65 ft
→ Each step adds the same distance: 6.93 ft
Key Insight:
The horizontal position increases linearly with time because there's no horizontal force acting on the puck. Each time step adds exactly the same distance!
📉 Part 2: Iteration in Y-Dimension (Vertical Motion)
Complex pattern: Gravity pulls down, so vertical speed decreases each step!
Gravity pulls down at 32.2 ft/s²
Each 0.1 second, speed changes by: -32.2×0.1 = -3.22 ft/s
• t = 0.0s: y = 3 ft, v_y = 40 ft/s ↑
• t = 0.1s: y = 3 + 40×0.1 - ½×32.2×(0.1)² = 6.84 ft, v_y = 40 - 3.22 = 36.78 ft/s ↑
• t = 0.2s: y = 6.84 + 36.78×0.1 - ½×32.2×(0.1)² = 10.36 ft, v_y = 36.78 - 3.22 = 33.56 ft/s ↑
• t = 0.3s: y = 10.36 + 33.56×0.1 - ½×32.2×(0.1)² = 13.57 ft, v_y = 33.56 - 3.22 = 30.34 ft/s ↑
• t = 0.4s: y = 13.57 + 30.34×0.1 - ½×32.2×(0.1)² = 16.45 ft, v_y = 30.34 - 3.22 = 27.12 ft/s ↑
• t = 0.5s: y = 16.45 + 27.12×0.1 - ½×32.2×(0.1)² = 19.02 ft, v_y = 27.12 - 3.22 = 23.90 ft/s ↑
→ Height increases but by LESS each step (slowing down!)
Key Insight:
The vertical position follows a parabolic curve because gravity continuously accelerates the puck downward. The puck rises quickly at first, slows down, reaches a peak, then falls!
🎯 Part 3: Combining X and Y - The Complete Path
The puck's position at each moment combines both dimensions:
| Time (s) |
X Position (ft) |
Y Height (ft) |
Position (x, y) |
| 0.0 |
0.00 |
3.00 |
(0, 3) |
| 0.1 |
6.93 |
6.84 |
(6.93, 6.84) |
| 0.2 |
13.86 |
10.36 |
(13.86, 10.36) |
| 0.3 |
20.79 |
13.57 |
(20.79, 13.57) |
| 0.4 |
27.72 |
16.45 |
(27.72, 16.45) |
| 0.5 |
34.65 |
19.02 |
(34.65, 19.02) |
✨ These points trace out a curved path—the puck's trajectory!
Key Insight:
When we plot the X and Y positions together, we see the classic parabolic trajectory! The puck moves forward at a constant rate while simultaneously rising and falling due to gravity.
🔬 Part 4: From Iterations to Calculus
What happens if we make the time steps smaller and smaller?
- ✓ With 0.1s steps: we calculated 5 positions
- ✓ With 0.01s steps: we'd calculate 50 positions (more accurate!)
- ✓ With 0.001s steps: we'd calculate 500 positions (even better!)
- ✓ With INFINITELY small steps: That's CALCULUS!
🎓 Calculus finds the exact position at ANY instant by using a mathematical limit as the time step approaches zero. Instead of adding up tiny changes, we use derivatives and integrals to get perfect accuracy!
From Iterations to Continuous Functions with Calculus
Instead of calculating position at individual time steps, calculus gives us formulas that work for ANY time!
\(x(t) = x_0 + v_x \cdot t \quad \text{(horizontal: constant velocity)}\)
\(y(t) = y_0 + v_y \cdot t - \frac{1}{2}gt^2 \quad \text{(vertical: constant acceleration)}\)
📊 Comparing Iteration vs. Calculus Formula
Same example: 80 ft/s at 30°, starting at 3 ft height
At t = 0.5 seconds:
Iteration method: x = 34.65 ft, y = 19.02 ft (from adding 5 steps)
Calculus formula:
x(0.5) = 0 + 69.3×0.5 = 34.65 ft
y(0.5) = 3 + 40×0.5 - ½×32.2×(0.5)² = 3 + 20 - 4.025 = 18.975 ft
✓ Same answer! But calculus gives it instantly, no iteration needed.
🎯 Calculus Power: Velocity from Position
Taking the derivative gives us velocity at any moment:
Position: x(t) = 69.3t
Velocity: v_x(t) = dx/dt = 69.3 ft/s (constant!)
Position: y(t) = 3 + 40t - 16.1t²
Velocity: v_y(t) = dy/dt = 40 - 32.2t ft/s (decreasing!)
At t = 0.5s: v_y = 40 - 32.2×0.5 = 23.9 ft/s ↑
At t = 1.24s: v_y = 40 - 32.2×1.24 = 0 ft/s (peak height!)
At t = 2.0s: v_y = 40 - 32.2×2.0 = -24.4 ft/s ↓ (falling!)
📈 Calculus Power: Acceleration from Velocity
Taking the derivative again gives us acceleration:
Velocity: v_x(t) = 69.3
Acceleration: a_x(t) = dv_x/dt = 0 ft/s² (no horizontal force!)
Velocity: v_y(t) = 40 - 32.2t
Acceleration: a_y(t) = dv_y/dt = -32.2 ft/s² (gravity!)
This acceleration is constant—gravity always pulls down with the same force!
🎓 Finding Max Height with Calculus
The puck reaches maximum height when vertical velocity = 0:
Set v_y(t) = 0:
40 - 32.2t = 0
t = 40/32.2 ≈ 1.24 seconds
Substitute into y(t):
y(1.24) = 3 + 40(1.24) - 16.1(1.24)² = 3 + 49.6 - 24.77 ≈ 27.8 feet
The puck reaches 27.8 feet at its peak!
🌟 The Big Idea
Iterations show us HOW calculus works by adding up tiny changes. Calculus formulas give us the EXACT answer by taking the mathematical limit as those changes become infinitely small. This is the power of derivatives and integrals—they turn step-by-step arithmetic into instant, precise calculations!
Advanced Calculus: Differential Equations and Numerical Methods
When forces change continuously (like drag that depends on velocity), we need differential equations and return to iteration methods—but much more sophisticated ones!
\(m\frac{dv_x}{dt} = -\frac{1}{2}\rho v^2 C_d A \cdot \frac{v_x}{v} \quad m\frac{dv_y}{dt} = -mg - \frac{1}{2}\rho v^2 C_d A \cdot \frac{v_y}{v}\)
🔬 Euler's Method: Simple Numerical Integration
The basic idea: Use derivatives to predict the next small step
Algorithm:
1. Start with initial position (x₀, y₀) and velocity (v_x₀, v_y₀)
2. Calculate forces: F_x = -drag_x, F_y = -mg - drag_y
3. Calculate acceleration: a_x = F_x/m, a_y = F_y/m
4. Update velocity: v_x₁ = v_x₀ + a_x×Δt, v_y₁ = v_y₀ + a_y×Δt
5. Update position: x₁ = x₀ + v_x₀×Δt, y₁ = y₀ + v_y₀×Δt
6. Repeat from step 2 with new values!
→ This is iteration with physics—calculus tells us the rate of change at each instant!
🎯 Runge-Kutta Method (RK4): The Gold Standard
More accurate than Euler—samples the derivative at multiple points per step
The RK4 approach:
- Calculate slope k₁ at the beginning of the interval
- Calculate slope k₂ at the midpoint using k₁
- Calculate slope k₃ at the midpoint using k₂
- Calculate slope k₄ at the end using k₃
- Weighted average: Δy = (k₁ + 2k₂ + 2k₃ + k₄)/6 × Δt
Result: With the same step size, RK4 is ~100× more accurate than Euler!
📊 Example: Comparing Methods for Real Puck Flight
80 ft/s shot at 30° with air resistance included:
| Method |
Step Size |
Max Height |
Accuracy |
| No drag formula |
N/A |
27.8 ft |
Exact (but unrealistic) |
| Euler |
0.1s |
26.2 ft |
±5% error |
| Euler |
0.01s |
26.45 ft |
±0.5% error |
| RK4 |
0.1s |
26.48 ft |
±0.01% error |
|
NHL tracking systems use RK4 with Δt = 0.001s for real-time trajectory prediction!
|
🌪️ Adding Complexity: Magnus Effect (Spinning Puck)
When the puck spins, it curves! This adds another force to our differential equations:
Magnus lift force: F_L = ½ρv²C_L A
Direction: perpendicular to velocity and spin axis
Enhanced differential equations:
m(dv_x/dt) = -drag_x + Magnus_x
m(dv_y/dt) = -mg - drag_y + Magnus_y
→ Now we need 3D vector calculus and numerical integration!
🎓 The Beautiful Connection
We started with simple iterations to understand motion step-by-step.
Calculus gave us exact formulas for simple cases (constant forces).
But real physics brings us back to iteration—sophisticated numerical methods that use calculus (derivatives) at each tiny step to handle complex, changing forces.
This is how modern physics works: analytical calculus provides insight, numerical calculus provides solutions!
💻 Real-World Application
NHL player tracking systems (like NHL Edge IQ) use these exact methods to:
- ✓ Predict puck trajectory in real-time (RK4 integration, 1000 Hz)
- ✓ Calculate expected goals (xG) by simulating thousands of shots
- ✓ Optimize goalie positioning based on trajectory predictions
- ✓ Detect when shots are tipped/deflected by analyzing acceleration discontinuities